联系我们
与泰克代表实时聊天。 工作时间:上午 9:00 - 下午 5:00(太平洋标准时间)。
致电我们
工作时间:上午9:00-下午5:00(太平洋标准时间)
下载
下载手册、产品技术资料、软件等:
反馈
三相逆变器电机驱动器分析
5 系列/5 系列 B/6 系列 B MSO 选配 5-IMDA/6-IMDA 应用产品技术资料
三相功率系统的测量和分析本质上比单相系统更复杂。尽管示波器能够以高采样率捕获电压和电流波形,但需进一步计算才能从数据中产生关键的功率测量值。基于示波器的三相解决方案允许使用高达 16 位的 HiRes 采集模式捕获具有更高采样率、更长记录长度的三相电压和电流波形,并在自动测量的支持下产生关键的功率测试结果。基于脉宽调制 (PWM) 的功率转换器(例如变频电机驱动器)会使测量复杂化,因为提取 PWM 信号的精确零交叉点非常重要,因此对于电机设计师而言,示波器成为推荐的用于验证和故障排除的测试工具。旨在用于对逆变器、电机和驱动器进行自动化功率分析的专用软件,极大地简化了对 PWM 系统的重要三相功率测量,并可以帮助工程师更快地了解他们的设计。借助泰克逆变器电机驱动器分析 (IMDA) 解决方案,设计师能够充分利用 5 系列/5 系列 B/6 系列 B MSO 上的高级用户界面、六个或八个模拟输入通道和“高分辨率”模式(16 位),设计出更佳和更高效的三相电机驱动器系统。IMDA 解决方案能够为工业电机以及交流感应电机、永磁同步电机 (PMSM) 和无刷直流 (BLDC) 电机的驱动器系统提供快速、准确和可重复的电气测量结果。它可以配置为测量直流到三相交流转换器,例如电动汽车中使用的转换器。
主要功能和技术规格
- 准确分析用于驱动交流感应电机、无刷直流 (BLDC) 电机和永磁同步 (PMSM) 电机的三相 PWM 信号。
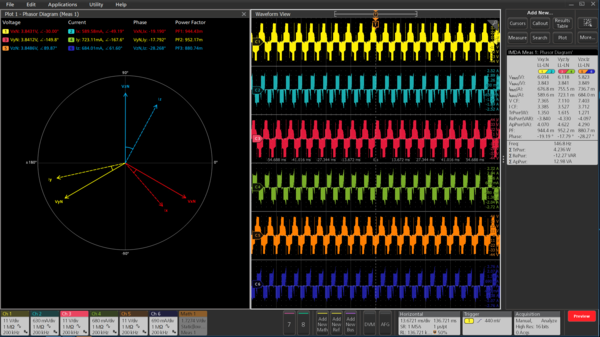
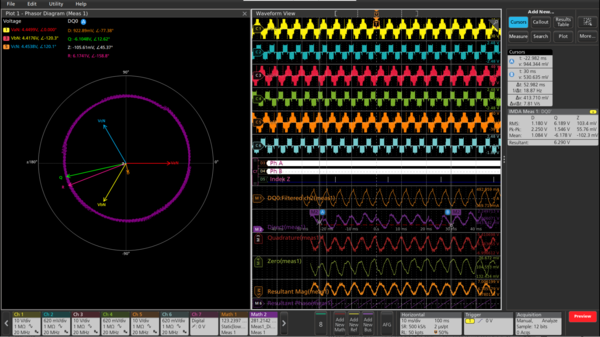
- 基于示波器的独特相量图指示已配置布线对的 VRMS、IRMS、VMAG、IMAG 和相位关系,一目了然。
- 通过同时查看时域中的驱动器输入/输出电压和电流信号及相量图来调试电机驱动器设计。
- 三相自动设置功能配置示波器的最佳水平、垂直、触发和采集参数,以采集三相信号。
- 根据 IEC-61000-3-2、IEEE519-2014 和 IEEE519-2022 或自定义限制测量三相谐波。
- 根据选定的接线配置测量系统效率。
- 通过 5 系列/5 系列 B/6 系列 B MSO 上直观的拖放界面快速添加和配置测量。
- 分析逆变器和汽车三相设计的直流输入和交流输出接线配置。
- 在分析期间显示 PWM 过滤的边沿限定符波形。
- 在特定测量的分析过程中,显示每个记录或每个周期模式的测试结果。
- 支持特定测量的时间趋势图和采集趋势图。
- 支持特定接线的线对线到线对中性线的数学转换。
- 支持使用示波器光标进行相位图和结果矢量导航的 DQ0 测量。
- 支持 DQ0 测量的角测量偏置配置。
- 支持使用旋转变压器、霍尔传感器和 QEI(正交编码器接口)信号进行机械测量和 DQ0,无论是否使用“索引”脉冲。
- 支持扭矩测量。
- 支持通过基频和全频谱对所有测量进行谐波门控。
- 计算机械功率和系统效率。
测量概述
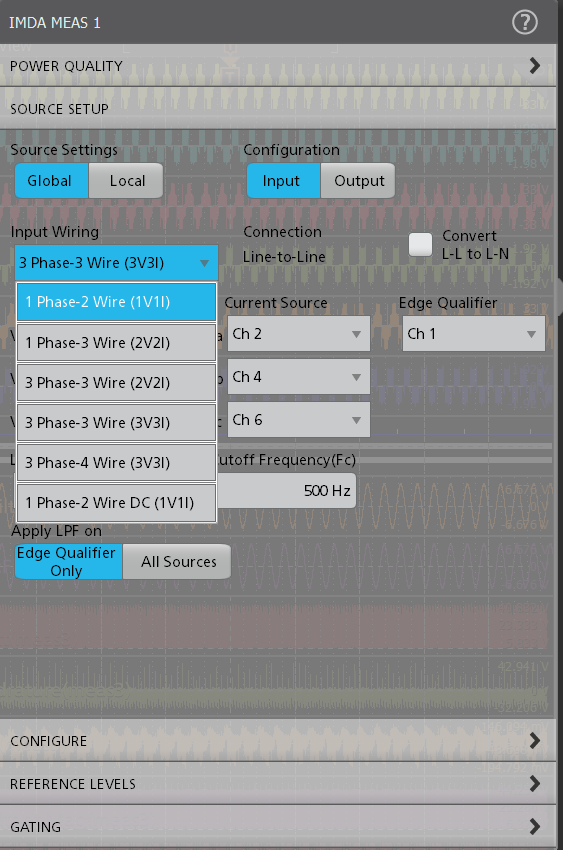
可变频驱动器等三相功率转换器在设计过程中需要进行一系列测量。用于 5 系列/5 系列 B/6 系列 B MSO 的逆变器、电机和驱动器分析包自动执行分组到电气分析组中的关键电气测量。测量可配置为测量输入或输出接线配置。

测量可设置为测量 1V1I(1 相 2 线)、2V2I(1 相 3 线)、2V2I(3 相 3 线)、1V1I(1 相 2 线直流)或 3V3I(3 相 3 线)和 3P4W(3 相 4 线)以支持各种电源和电机配置。可进行线对线或线对中性线的测量,以支持 Delta 和 Wye 或 Star 配置。
谐波
功率波形很少为教科书式的正弦曲线。谐波测量将非正弦电压或电流波形分解为其正弦分量,指示各分量的频率和幅度。
谐波分析最多可执行 200 次谐波。可以根据您的需求,在测量配置中指定范围设置最大谐波次数。测量各相位的 THD-F、THD-R、TDD 和基波值。可以根据 IEEE 519-2014、IEEE 519-2022 或 IEC 61000-3-2 标准或自定义限制对测量进行评估。可以将测试结果记录在详细的报告中,并指示状态(通过/失败)。
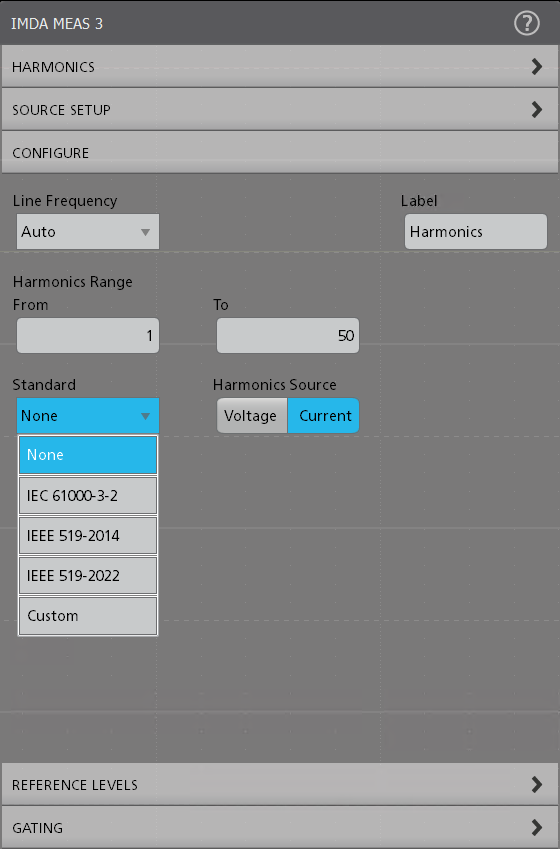

谐波图显示的是所有三相的测试汇总结果,因此用户可以关联各相之间的测试结果。该图还直观地显示测试结果。在通过条件下,谐波条以绿色突出显示,并在超过测试限制时以红色突出显示。这便于在调试谐波设计时快速了解情况。
电能质量
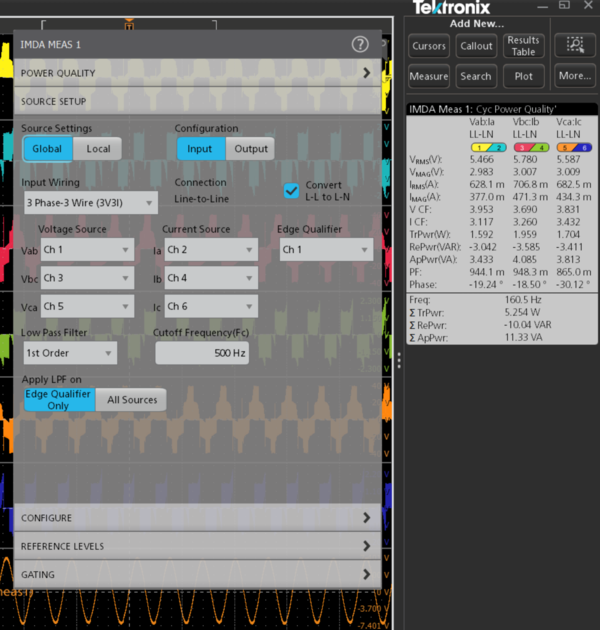
该测量提供关键的三相功率子测量,包括:电压和电流的频率和 RMS 幅度、电压和电流的波峰因数、PWM 频率以及各相的相角。它还显示有功功率总和、无功功率总和、视在功率分量总和。
此外,在线对中性线配置中,此测量显示所有三相的有功功率、无功功率和视在功率分量。
电压和电流矢量可以显示在相量图上,因此您可以快速判断各相的相移和相间的平衡。每个向量由一个 RMS 值表示,相位通过使用离散傅立叶变换 (DFT) 方法计算。

电能质量测量可配置为在输出侧提供关键三相功率测量,包括:电压和电流的频率和 RMS 幅度、电压和电流的波峰因数、PWM 频率、有功功率、无功功率、视在功率、每相的功率因数和相角。
效率
效率测量输出功率与输入功率的比率。IMDA 解决方案支持三相交流和逆变器配置的效率。通过使用 2V2I 方法,可以使用 8 个示波器通道(输入侧有 2 个电压源和 2 个电流源,输出侧有 2 个电压源和 2 个电流源)测量三相效率。该解决方案根据不同的输入和输出接线组合计算各相位的效率(对于 3V3I 配置)和系统的总(平均)效率。

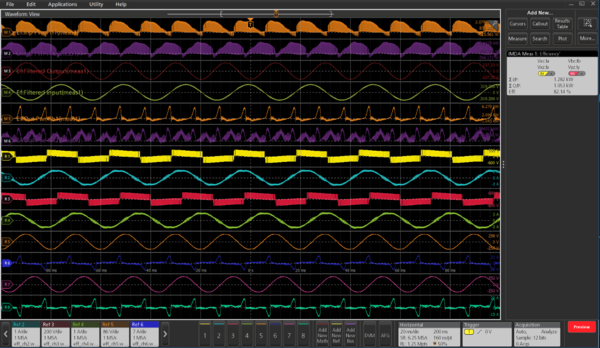
纹波分析
纹波被定义为恒定直流分量上的残余或多余交流电压。通常在直流总线上测量纹波。此测量有助于了解信号在输入端从 AC 转换为 DC 的效率,以及多余分量对输出端的 PWM 信号的影响。


直接正交零 (DQ0) 分析
三相交流电机的行为可通过如下旋转电压和电流方程进行描述。
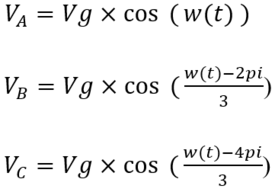
其中:
A、B、C 是三相交流信号。
Vg 是相应的增益。
w(t) 是 2pi×f×t。
AC 接口处的电压 (V) 和电流 (I) 通常分开,一般相差 120 度。这些 V 和 I 分量是时变的,这意味着没有稳态工作点的表示。
通常,交流信号是真实世界的信号,但将它们转换为直流信号有助于获得直接正交变换的抽象表示。DQ0 有助于模拟控制器。这些信息有助于更多地了解控制器正在做什么,并允许调整控制器设计。
DQ0 变换通常会旋转 AC 波形的参考系,以将其转换为 DC 信号。这样便可在执行逆变换以恢复实际三相交流结果之前对直流信号进行简化计算。
为测量和监控控制系统的输出,设计人员依靠 FPGA 和基于 ASIC 的硬件处理传感器数据以获取 DQ0 信息,然后通过多次迭代检查控制信息。该解决方案涉及复杂且耗时的过程。
测量或探测 D-Q-0 信号实际上具有挑战性。典型的解决方案为控制器提供外部激励,以将控制器输入信号和模数控制器 (ADC) 输出复制为 DQ0 信号。
为应对这一挑战,用户依靠软件应用程序 DQ0 解决方案了解电源控制系统中的复杂动态现象。
IMDA 解决方案采用 DQ0 变换,旋转三相波形的参考系,使其成为直流信号。这些直流量的计算可以简化,然后将其逆变,得到实际的三相交流结果。基本控制方案如下图所示。
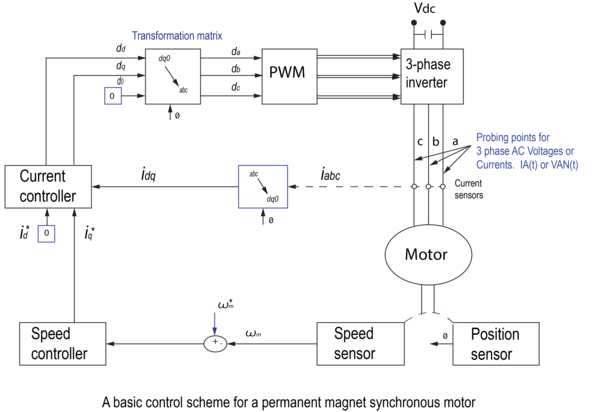
泰克在电气分析测量类别下提供一种名为 DQ0 的专利测量,作为使用 Clarke 和 Park 变换矩阵的附加选项。DQ0 功能在 5 系列、5 系列 B 和 6 系列 B MSO 上作为选件 5-IMDA-DQ0/6-IMDA-DQ0 提供。
DQ0 方法将角度 (θ) 计算为 2*pi*f*t,并根据我们预期时变信号所在位置推断参考系。DQ0 帧(相量图)以正确的速度和频率旋转,不一定与转子同相,这有助于理解电机的瞬时状态。
3V3I 配置支持此测量,将来自电机的三相电压或电流信号作为输入,并将其转换为 D-Q-0 系数,作为电机设计人员调整其 PWM 控制器电路设计的强大调试工具。
该测量通过转换三相驱动器输出电压或电流波形计算实时 DQ0 转换。变换矩阵将时变交流信号转换为非时变直流分量。这有助于重现控制系统对瞬时电机扭矩和速度的理解。通过使用 DQ0 变换,电机设计人员能够将三相电源部分的性能与控制系统的硬件算法和设计相关联。重叠的 DQ0 和三相 ABC 矢量作为一项很好的调试特征,设计人员可以在同一绘图上同时观察两个向量轴。
此测量具有不同的输出,例如具有 D 和 Q 幅度的标量值、具有统计数据的 RMS 值、导出的数学波形和相量图。数学波形提供直流变换后的波形。这在单个视图中提供控制系统输出的不同视图。
通过观察 DQ0 结果,可以得出一些重要的推论,如表示 RMS 纹波、峰峰值和高次谐波的变化。这些参数与理解控制系统中算法的操作直接相关。若无这些信息,则难以理解电机控制系统的性能。
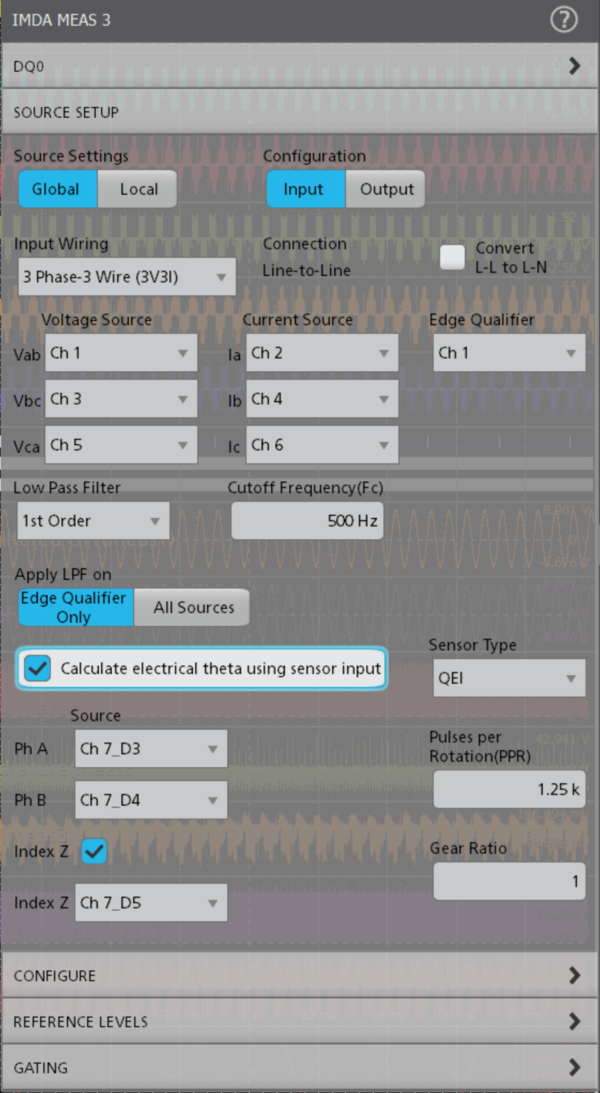
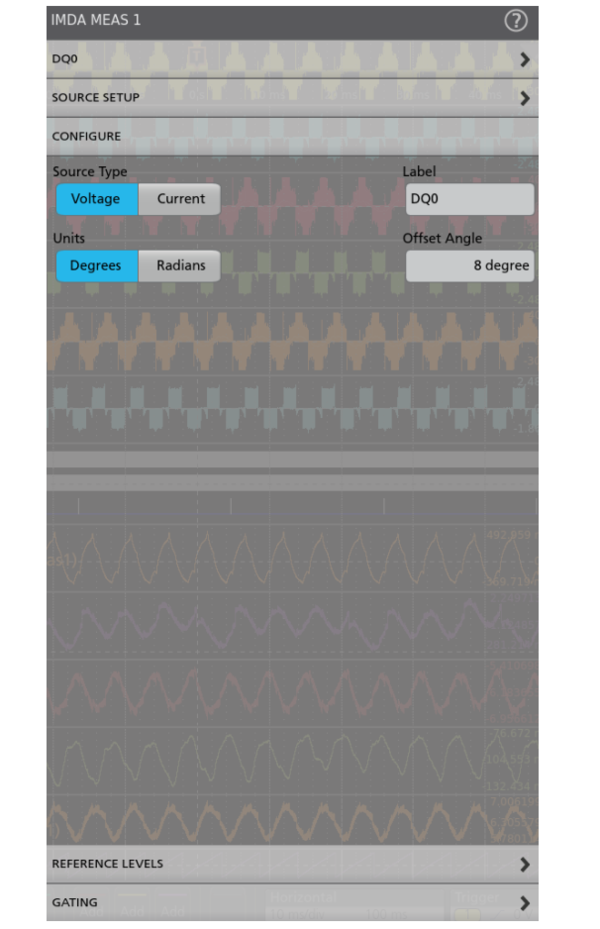
配置偏置(电气)角:
- 如果安装的编码器/传感器有任何错位状况,则予以调整。
- 如果将滤波器应用于电气信号后有任何低通滤波器延迟状况。
在配置和不配置传感器的情况下也同样支持。如果为电气测量配置了模拟源,为机械测量配置了数字源,则输入低通滤波器相位延迟和错位(组合为偏置角)。
增强的 DQ0 算法通过 D 和 Q 分量计算合成向量,并将合成向量显示为重叠的电机旋转,并与瞬时电机角度 (theta) 合并。

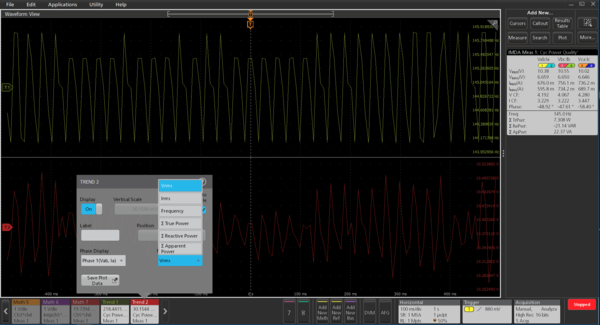
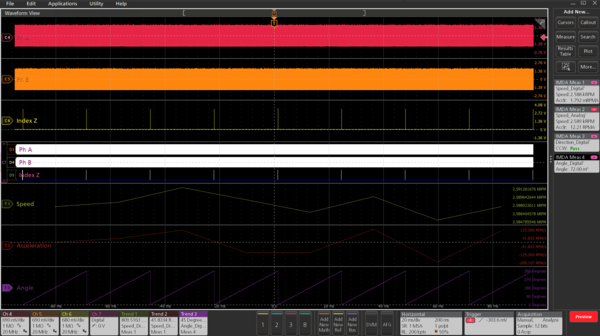
使用趋势分析进行动态测量
电机驱动器分析的一项常见要求是,能够在更长的测试时间、记录和大量采集中查看电机响应,以监控不同负载条件下的 DUT 行为。这种动态测量有助于了解最佳设计和电压、电流、功率、频率等不同参数间的相互依赖性及其基于负载条件的变化。您可以手动缩放并获取感兴趣的特定区域,以查看波形特定区域的测试结果。
IMDA 解决方案提供两种独特的电能质量测量趋势图,以支持此类要求:
- 时间趋势图
- 采集趋势图
每幅绘图均有其优点,可用于绘制电能质量测量下支持的子测量。时间趋势图显示的是各周期或采集波形(记录)的测量值,而采集趋势图显示的是每次采集中各记录的测量值平均值。可在测试配置期间设置采集计数。这使您能够捕获长数据记录以执行深入的记录分析并了解运动响应的动态行为。绘图可另存为 CSV 文件以进行后处理。


机械分析
IMDA 机械分析组别(选件 IMDA-MECH)支持使用霍尔传感器、旋转变压器和 QEI 输出信号来计算速度、加速度和方向信息。除了这些测量外,QEI 方法还支持角度测量并以度或弧度显示。加速度结果在报告中作为速度测量的一部分。测量需要极对数和相应的齿轮比测量关键的电机参数。方向测量需要在操作前配置一系列霍尔传感器上升边沿,并在操作期间对其进行验证。对于 QEI 方法,测量需要用到 QEI 输出信息 - 相位 A、相位 B、可选 Z 索引脉冲和每转脉冲数 (PPR)。
TPP1000 无源探头或高压差分 THDP0200/100 探头可根据电机输出功率和噪声水平捕获传感器输出。建议使用带有 TLP 逻辑探头的数字通道代替模拟通道,因为噪声较小,有助于为其他测试操作保留模拟通道,并使用单个灵活通道进行测量。
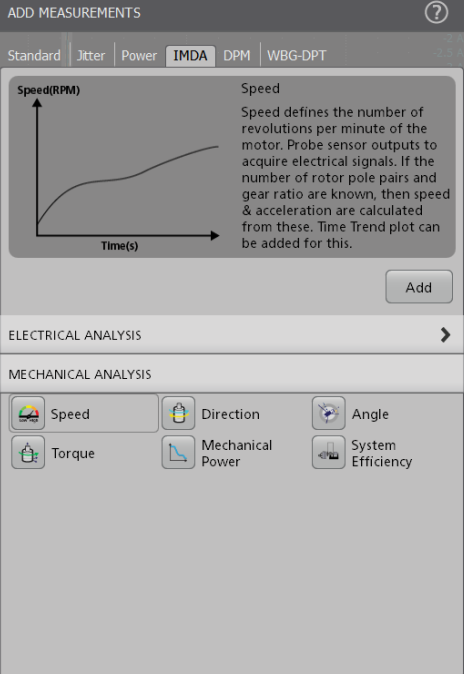
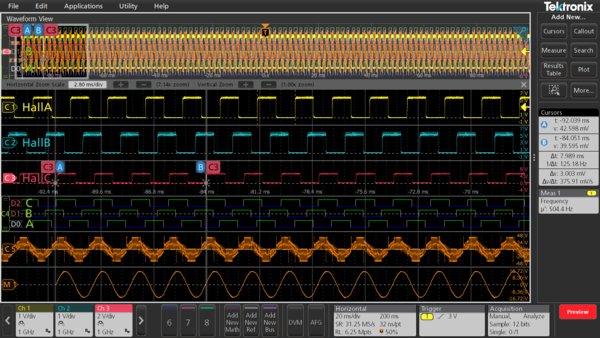
速度测量
霍尔传感器信号转换如下图所示。
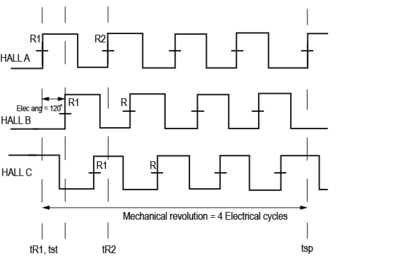
速度由以下等式定义,

其中:
TSP 和 TST 间的差异由极对数定义。
TST 是电脉冲的开始
TST 是电脉冲的结束
60 是 RPM(每分钟转数)
G 是齿轮比。
速度测量可在每次旋转或每个 QEI 传感器信号周期计算一次。
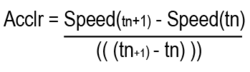
加速度测量
加速度是单位时间内速度的变化率。定义为
速度和方向支持以下各图:
- 直方图
- 时间趋势图
- 采集趋势图
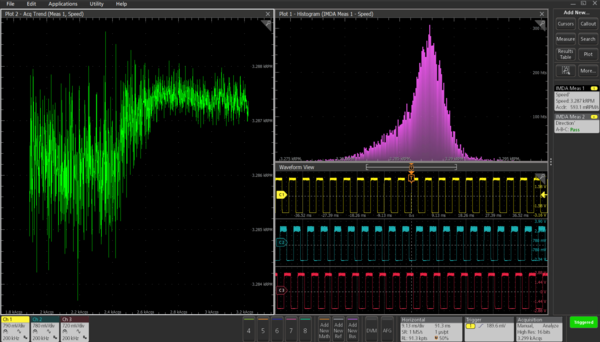
速度采集趋势图的重要性
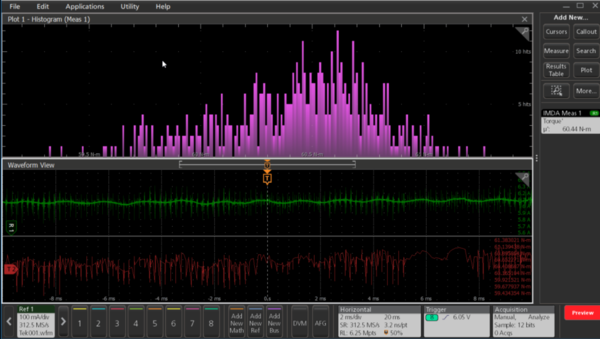
采集趋势图和直方图显示电机速度的抖动,否则需要使用颤振仪等专用仪器进行测量。该抖动信息(边缘时序的变化)测量电机速度的一致性。
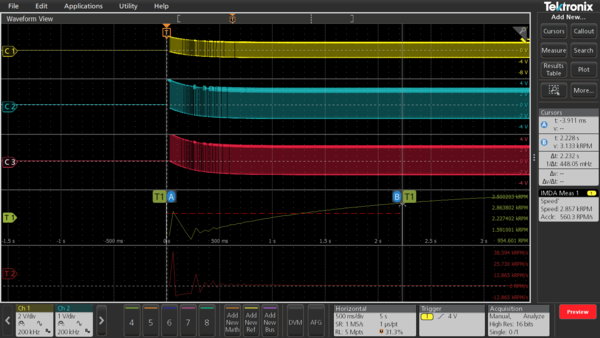
电机启动配置文件
电机设计人员有兴趣在设计阶段研究电机启动配置文件。时间趋势给出电机的瞬时速度信息,否则很难测量。
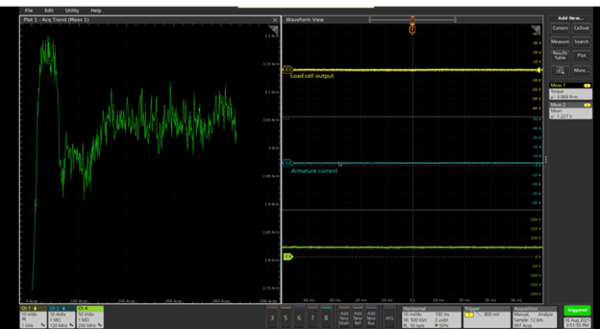
下面是电机图像启动顺序的时间趋势图,其中电机从 OFF(关闭)状态到 ON(开启)状态所需的启动时间为 2.3s。同样,可以执行 ON(开启)到 OFF(关闭)状态并深入了解减速过程,如图显示电机减速进入停止状态图像的时间趋势图所示。

方向测量
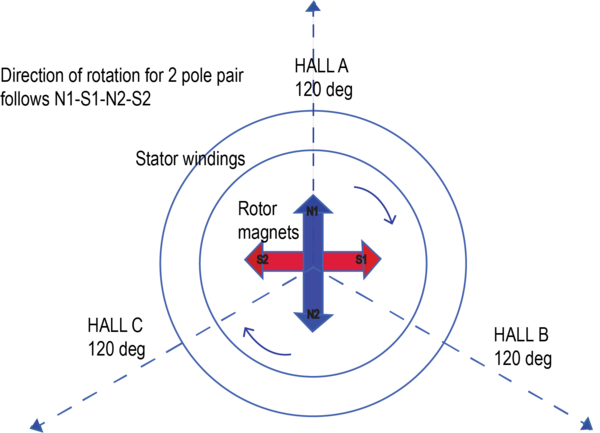
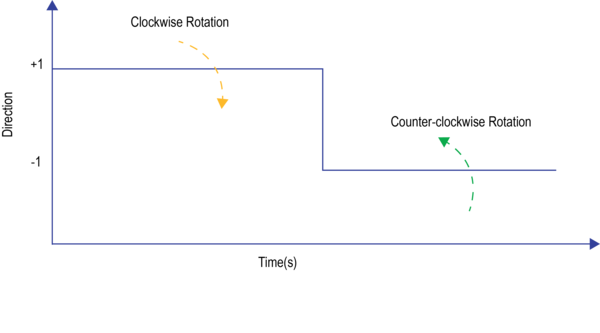
钻头、洗衣机和电动泵等一些应用需要电机快速运行和改变方向。方向测量有助于此分析。霍尔传感器输出的上升边沿或下降边沿的顺序决定旋转方向。方向测量需要所有三个霍尔信号。它们可用作方向测量的可配置参数,并在电机运行期间进行验证。通常,A-B-C 序列被解释为顺时针 (CW),而 A-C-B 序列被解释为逆时针 (CCW)。
例如,如果第一个上升沿来自霍尔传感器 A,而霍尔传感器 B 的上升沿存在于 120 度处,则转子旋转顺序为 A-B-C。否则,如果霍尔传感器 C 的第二个上升沿出现在 120 度处,则顺序为 A-C-B。
以下是计算方向信息的公式。
顺序(顺时针)= (A-B-C)
顺序(逆时针)= (A-B-C)
其中,顺序函数检查所有三个霍尔传感器信号的上升边沿序列。
方向可以显示为 ACQ 趋势图,以便在调试期间帮助电机反转方向时给出准确的时戳可视化指示。这在下图中显示为示例图。
旋转变压器
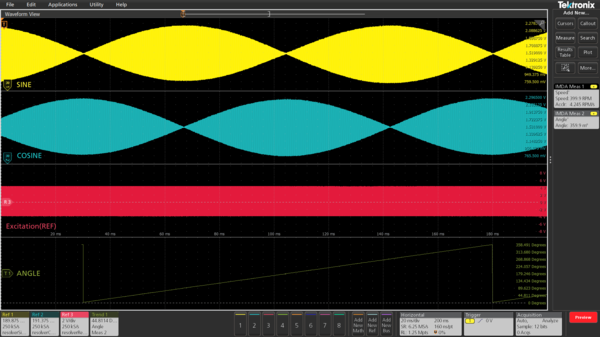
旋转变压器是一种传感器,随电机安装,以测定转子的角度位置。
旋转变压器会产生三个信号输出,其中激励信号用作参考,正弦和余弦信号用作分析。正弦和余弦信号相互正交,并通过参考信号进行调制。正弦和余弦包络在测量不同参数前提取。
支持旋转变压器,可进行以下测量:
瞬时角通过以下方式测量:
角度 = arctan(正弦值/余弦值)
计算速度的公式为
转速 = [频率(包络信号)/极对] Hz
其中包络信号为包络提取的输出。
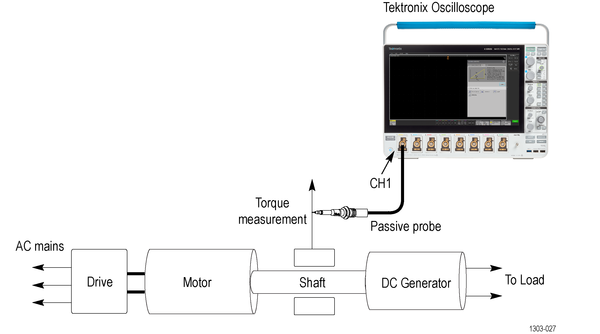
扭矩测量
电机的扭矩是其输出轴上产生的旋转力,它是一种以牛顿米 (Nm) 为单位的扭转力。
IMDA 支持两种扭矩测量方法:
- 传感器方法:
这是最常见的扭矩测量方法,它使用扭矩传感器或测力传感器输出。通过将旋转扭矩传感器与电机轴连接在一起,可以测量电机产生的扭矩。用户可以使用无源电压探头捕获扭矩波形。电压波形与扭矩测量值成正比。
用户必须配置扭矩传感器的高值、低值以及相应输出电压的高值、低值。该测量方法将采集到的电压波形重新计算为扭矩值。
测力传感器提供作用力。扭矩值以力和臂长(距离)的乘积计算得出。

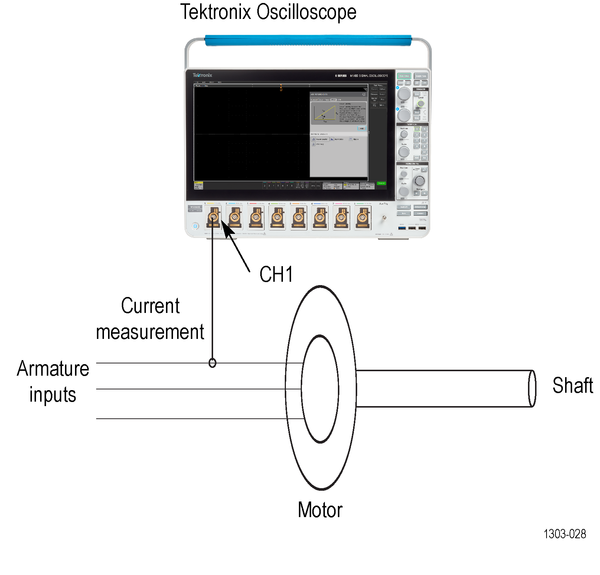
- 电流法:
许多电机都有数据规格,可以根据这些规格,通过使用扭矩常数,按照与施加的 RMS 电流所成的比例推断出扭矩。这是扭矩的估计值。
通常,任何直流电机中产生的扭矩都与扭矩常数和电枢电流的乘积成正比。在串联电机中,磁场电流与电枢电流成正比。
据估计,转子产生的扭矩与电枢电流成正比。用户必须配置电机的扭矩常数。
扭矩 = 扭矩常数 x Irms

扭矩测量支持以下图解:
- 直方图
- 时间趋势图
- 采集趋势图
以下扭矩单位需要配置:
- 牛顿米 (N·m)
- 英尺磅 (ft·lb)
- 英寸盎司 (in·oz)
- 英寸磅 (in·lb)。
机械功率测量
旋转轴的机械功率由其旋转速度和提供的扭矩决定。此测量支持霍尔传感器和 QEI 编码器计算速度和扭矩。
机械功率测量使用扭矩传感器或电枢电流输入计算扭矩,使用霍尔或 QEI 传感器输入计算速度。使用这些输入计算的机械功率与速度乘积和轴扭矩成正比。
IMDA 支持不同的传感器类型,以测量电机的扭矩、转速和角度位置。
机械功率 = (扭矩 × 乘数) × 转速
其中的乘数基于扭矩单位,可以为 104.7252 nm、0.739522 oz-inch、141.9883 ft-lb 或 11.83235897 inch-lb。
转速以 RPM 为单位。
机械功率以瓦特为单位。


系统效率测量
系统效率是衡量电能转换为机械能的效率。此测量通常在不同负载下以不同速度进行,通常显示为速度扭矩曲线。
能效是衡量所有电气设备额定功率的标准,因此必须对其进行动态测量,以检查电机是否在所需区域内运行。
IMDA 系统效率测量采用电压和电流输入计算输入功率,采用扭矩和速度传感器信号计算输出机械功率。根据这些参数计算出系统效率。可以根据示波器的可用通道,使用 2V2I 或 3V3I 接线来计算电功率。
对于电气驱动电机,输出功率是机械功率,而输入功率是电功率,因此效率方程的计算公式为
系统效率 =((输出机械功率)/(输入电功率))× 100%



报告生成
IMDA 软件简化了设计和开发过程的数据收集、归档和文档编制。它支持生成 MHT 或 PDF 格式的报告,并带有通过/失败结果,以便于分析。
技术规格
- 接线配置
- 1V1I(1 相 2 线),2V2I(1 相 3 线),2V2I(3 相 3 线),2V2I(直流输入交流输出),3V3I(直流输入交流输出)或 3V3I(3 相 3 线)和 3P4W(3 相 4 线)
- L-L(线对线)到 L-N(线对中性线)转换
- 适用于 3 相 3 线 (3V3I)1
- 电气分析
- 电能质量、谐波2、纹波、DQ03、效率4
- 支持的传感器
- 霍尔传感器、旋转变压器、QEI(正交编码器接口)
- 机械分析
- 速度、加速、角度(QEI 方法)、方向、扭矩、机械功率和系统效率
- 谐波门控
- 基频和全频谱
- 三相自动设置
- 适用于所有测量
- 绘图
- 时间趋势图、采集趋势图、相量图、谐波条形图 5、DQ0 图和直方图(速度分布)
- 报告
- MHT 和 PDF 格式,数据导出到 CSV 格式
- 消磁/时延校正(静态)
- 自动检测探头,自动调零。用户可以对电压和电流探头进行相位校正,从每个通道的菜单中对电流探头进行消磁
- 源支持
- 实时模拟信号,基准波形,数学波形
订购信息
型号
| 产品 | 条件6 | 支持的仪器 | 可用带宽 |
|---|---|---|---|
| 新仪器订购选项 | 5-IMDA | 5 系列 MSO(MSO56、MSO58) 5 系列 B MSO(MSO56B、MSO58B) MSO58LP |
|
| 产品升级选项 | SUP5-IMDA | ||
| 浮动许可证 | SUP5-IMDA-FL | ||
| 新仪器订购选项 | 5-IMDA-DQ0 | ||
| 产品升级选项 | SUP5-IMDA-DQ0 | ||
| 浮动许可证 | SUP5-IMDA-DQ0-FL | ||
| 新仪器订购选项 | 5-IMDA-MECH | ||
| 产品升级选项 | SUP5-IMDA-MECH | ||
| 浮动许可证 | SUP5-IMDA-MECH-FL | ||
| 新仪器订购选项 | 6-IMDA | 6 系列 B MSO(MSO66B、MSO68B) |
|
| 产品升级选项 | SUP6B-IMDA | ||
| 浮动许可证 | SUP6B-IMDA-FL | ||
| 新仪器订购选项 | 6-IMDA-DQ0 | ||
| 产品升级选项 | SUP6B-IMDA-DQ0 | ||
| 浮动许可证 | SUP6B-IMDA-DQ0-FL | ||
| 新仪器订购选项 | 6-IMDA-MECH | ||
| 产品升级选项 | SUP6B-IMDA-MECH | ||
| 浮动许可证 | SUP6B-IMDA-MECH-FL |
软件捆绑套件
| 支持的仪器 | 捆绑选项 | 说明 |
|---|---|---|
5 系列/5 系列 B MSO | 5-PRO-POWER-1Y | 专业版电源捆绑套件 1 年期许可证 |
| 5-PRO-POWER-PER | 专业版电源捆绑套件永久许可证 | |
| 5-ULTIMATE-1Y | 旗舰版捆绑套件 1 年期许可证 | |
| 5-ULTIMATE-PER | 旗舰版捆绑套件永久许可证 | |
| 5-PRO-AUTO-1Y | 专业版汽车捆绑套件 1 年期许可证 | |
| 5-PRO-AUTO-PER | 专业版汽车捆绑套件永久许可证 | |
| 6 系列 B MSO | 6-PRO-POWER-1Y | 专业版电源捆绑套件 1 年期许可证 |
| 6-PRO-POWER-PER | 专业版电源捆绑套件永久许可证 | |
| 6-ULTIMATE-1Y | 旗舰版捆绑套件 1 年期许可证 | |
| 6-ULTIMATE-PER | 旗舰版捆绑套件永久许可证 | |
| 6-PRO-AUTO-1Y型 | 专业版汽车捆绑套件 1 年期许可证 | |
| 6-PRO-AUTO-PER | 专业版汽车捆绑套件永久许可证 |
推荐探头
| 探头型号 | 说明 | 数量 |
|---|---|---|
| TCP0030A 或 TCP0150 | 电流探头 | 3 用于 3V3I 接线7 |
| THDP0200 或 TMDP0200 | 高压差分探头 | 3 用于 3V3I 接线 1 |
1 对于 3 相 4 线 (3V3I),连接始终为线对中性线,而对于 3 相 3 线 (2V2I),则为线对线。
2 支持自定义限制。
3 仅适用于 3V3I 接线。
4 仅适用于 2V2I 接线。
5 范围滤波器作为测量配置的一部分。
6 选件 IMDA-DQ0 和 IMDA-MECH 需要选件 IMDA 作为先决条件
7 为执行效率测量,需要四个量。
Tektronix is ISO 14001:2015 and ISO 9001:2015 certified by DEKRA. 48C-61649-7
